河南农业科学 ›› 2025, Vol. 54 ›› Issue (10): 150-158.DOI: 10.15933/j.cnki.1004-3268.2025.10.016
李晓锁1,2,郭旺1,2,3,朱华吉1,2,3,顾静秋1,2,3,李庆学1,2,3,吴华瑞1,2,3
LI Xiaosuo1,2,GUO Wang1,2,3,ZHU Huaji1,2,3,GU Jingqiu1,2,3,LI Qingxue1,2,3,WU Huarui1,2,3
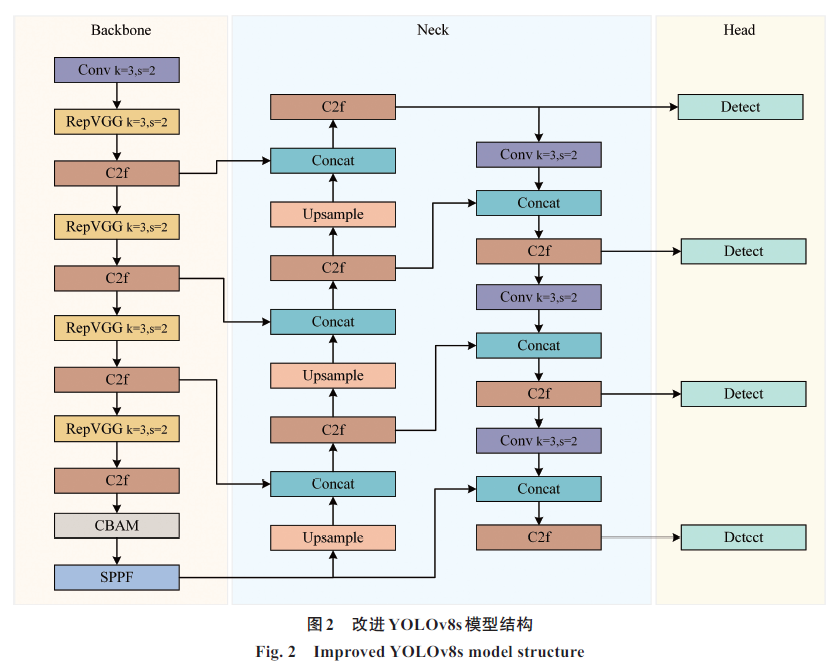
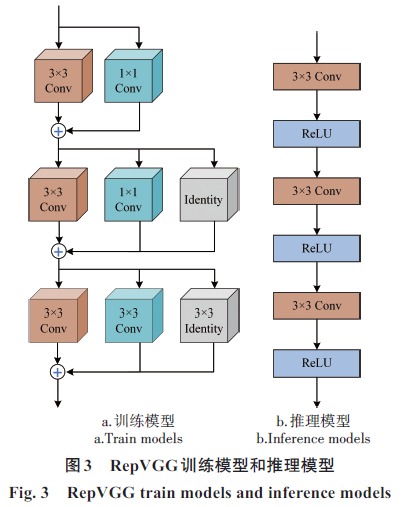
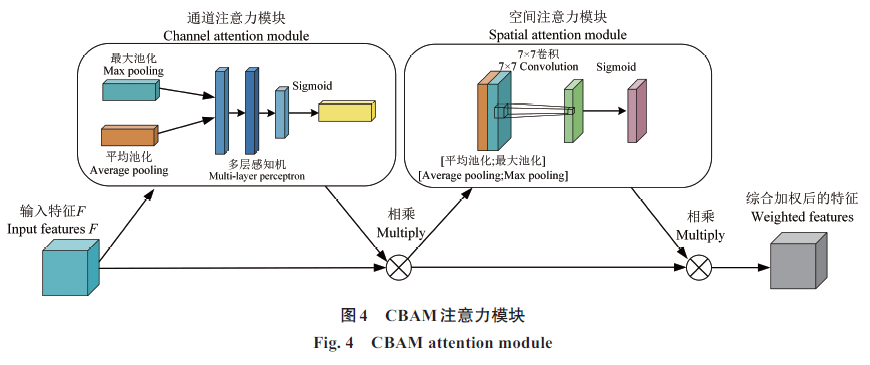
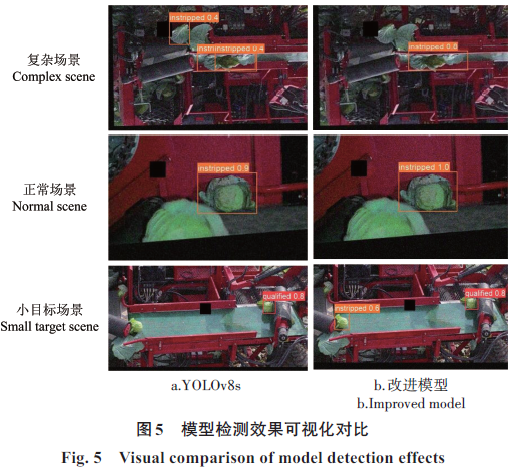
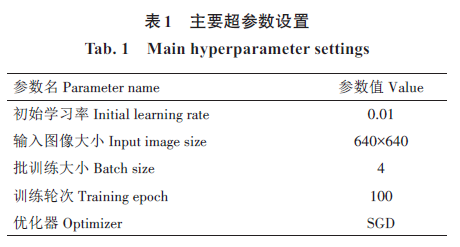
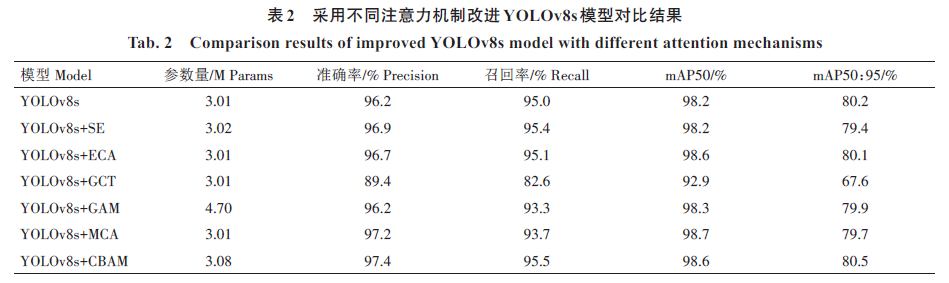
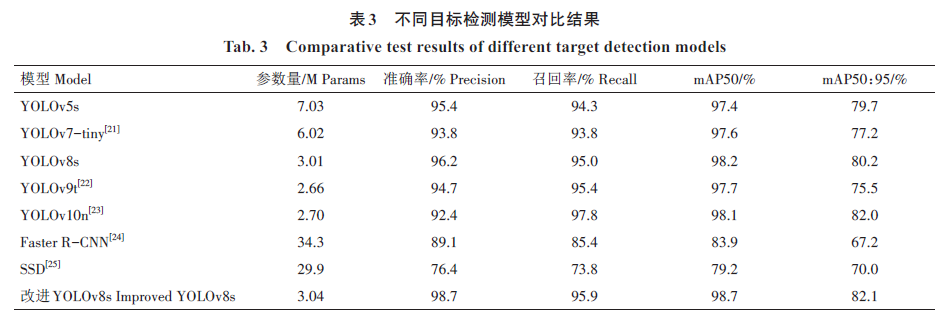
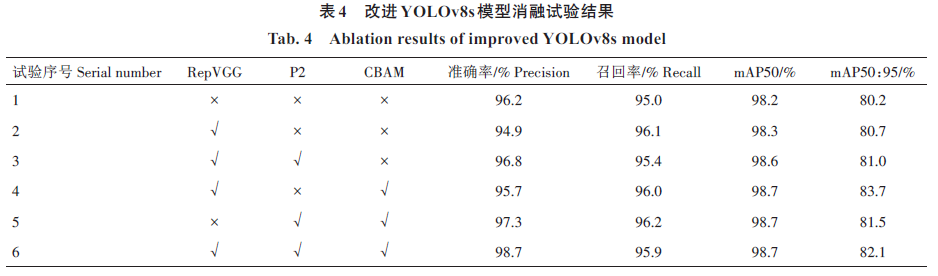
摘要: 采收后甘蓝质量精准识别是实现露地甘蓝无人化采收作业质量检测的前提,为解决采收甘蓝质量识别过程中存在的采收背景环境复杂、运输装置运行速度快导致甘蓝特征难以获取、对小目标识别精度不足的问题,提出一种基于YOLOv8s的轻量化采收作业质量检测方法。首先,采用RepVGG模块替换Backbone层中部分Conv模块,增强原始模型特征提取能力的同时减少模型参数量;其次,引入CBAM卷积注意力模块抑制复杂背景中的非关键特征信息,使模型更加关注采收的成熟甘蓝质量;最后,在Head层中增加下采样为4的小目标检测头P2,增强模型对多尺度甘蓝的检测能力。结果表明,改进的模型相较于原始YOLOv8s模型,准确率、召回率和mAP50:95(IoU在0.50~0.95阈值的平均精度)分别提高2.5、0.9、1.9百分点。与常见的目标检测模型相比,在甘蓝采收作业数据集上的检测结果也具有明显优势。改进的模型能够准确识别露地甘蓝无人化采收作业的质量,可为远程调控机具作业参数提供数据支撑,为露地蔬菜自主无人精准作业的研究和应用提供理论参考。
中图分类号: